|
|

|

|
| e-Pub |
Section: New Results
Motion-planning in human-populated environment
Planning-based motion prediction for pedestrians in crowded environments
Participant : Alejandro Dizan Vasquez Govea.
|
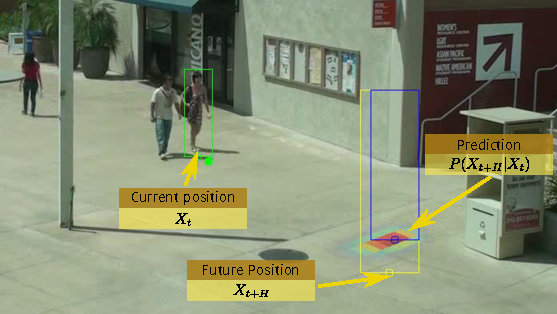
We have also explored the application of motion planning algorithms to the prediction of human motion (Fig. 11 ). We have proposed a novel planning-based motion prediction approach [12] which addresses the weaknesses of the previous state-of-the-art motion prediction technique [34] , namely:
-
High computational complexity. This is dealt with by using the Fast Marching Method (FMM) [49] an efficient deterministic planning algorithm which computes the cost-to-go to a given location for every cell of a grid representing the agent's workspace. This grid is then used in a novel goal prediction algorithm and to produce a path-like prediction equivalent to the output of the Markov Decision Processes (MDPs) used by Kitani.
-
Limited ability to model the temporal evolution along the predicted path: this is addressed through the use of a velocity-dependent probabilistic motion model which is used to estimate a probability distribution of the future agent's position. This is then fused with a novel cost-based model to produce a full spatiotemporal prediction.
-
Constant-goal assumption. We propose a gradient-based goal prediction approach which does not rely on filtering, making it capable of quickly recognizing intended destination changes as they happen.
In our preliminary experiments, the proposed method significantly outperforms the accuracy of Kitani's approach while reducing the computation time by a factor of 30 using a parallel version of our algorithm.
|
Modeling human-flows from robot(s) perception
Participants : Olivier Simonin, Jacques Saraydaryan, Fabrice Jumel.
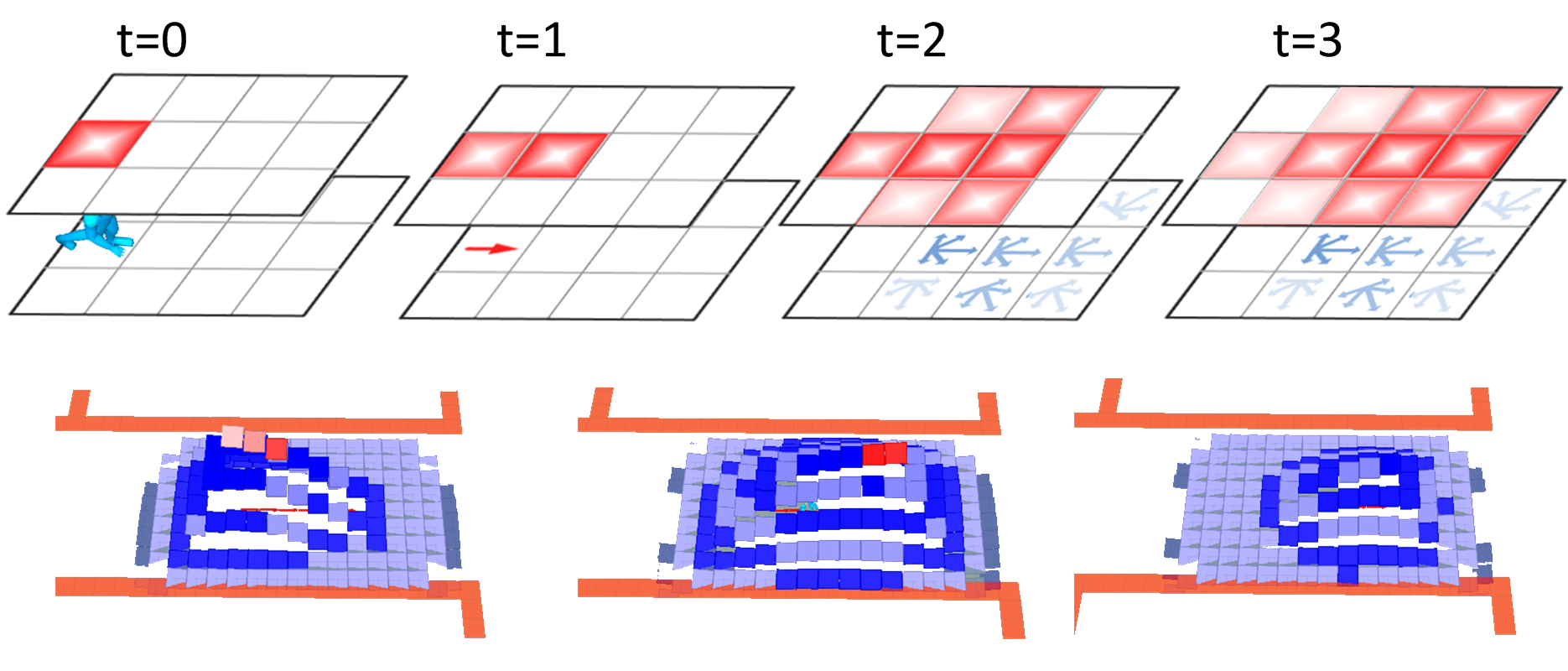
To deal with navigation in highly populated environments, eg. flows of humans, we started to investigate the problem of mapping these flows. The challenge is to build such an information from robots perception while they move autonomously to perform their tasks. We also work on predicting humans location from the perceptions and the constructed flow-grid. This led us to define two models : i) a flow-grid mapping computing in each cell the probability to move in each of the possible directions (illustrated in figure 12 .a), ii) a pheromone-based model allowing to compute the current possible location of humans (flows), see figure 12 .b. We are currently measuring the efficiency of the proposed mapping compared to existing models (which do not model directions). First results will be submitted soon (to IROS 2016).